장비설명
1. 본 실습장비는 실시간운영체제 실습과정에 적합한 RTOS 인 Osek OS가 포팅된 Coretex-M4 프로세서로 제어되는 H/W사양으로 구성.
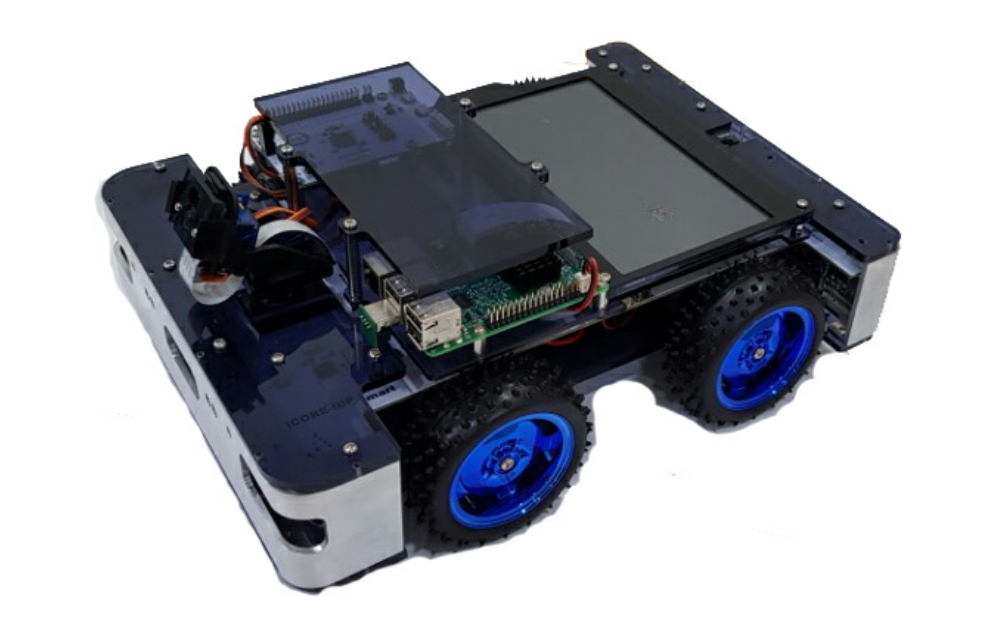
2. 본 실습장비 1set의 구성은 다음과 같다 : 제어모듈, 커넥티비티 모듈, 메인모듈
3. 제어모듈은 Coretex-M4 기반 프로세서가 메인 ECU 이고, Coretex-M0 보조컨트롤러 3개를 제어하는 구조로 되어 있음
4. 제어모듈의 메인 ECU 와 메인모듈의 3 개의 보조 컨트롤러는 CAN (Controller Area Network) 통신으로 연동 되어있음
5. 3개의 보조 컨트롤러에는 펌웨어가 내장되어 차량의 전방 후방 중앙부 센서 및 엑츄에이터와 바퀴의 모터를 제어하는 형태로 되어 있음.
6. 본 장치의 메인모듈의 카메라는 서보모터를 활용하여 방향조절이 가능하고 여기에서 촬영된 영상은 커넥티비티 모듈을 통하여 핸드폰 및 PC로 전송된다.
7. 배터리가 탑제되어 전원 연결 없이 운행이 가능하며 충전장치를 통해 재충전 할 수 있다
하드웨어 사양
| 구분 | 항목 | 상세 |
|---|---|---|
| Control Module | MCU | ST Cortex- M4 STM32F405 1024kb Flash / 192kb SRAM Up to 168MHz Frequecy |
| Interface | Push Switch 3EA (버튼 스위치) LED 4EA (LED 상태표시) Accel/GURO Sensor (기울기 가속도 센서) USB 2.0 Interfacer (PC Communication or Program Download) UART 1Port (Without UART Transceiver) CAN 1Port (Within CAN Transceiver) |
|
| CAN Transceiver | TI SN65HVD232 CAN Transceiver | |
| Main Module : Front |
MCU | ST Cortex- M4 STM32F405 1024kb Flash / 192kb SRAM Up to 168MHz Frequecy |
| CAN Transceiver | TI SN65HVD232 CAN Transceiver | |
| Interface | 전방 전조등 2EA (고휘도 LED램프) 전방 방향 지시등 2EA (LED 램프) Ultra Sonic 3EA (초음파 센서) |
|
| Main Module : Front |
MCU | ST Cortex- M4 STM32F405 1024kb Flash / 192kb SRAM Up to 168MHz Frequecy |
| CAN Transceiver | TI SN65HVD232 CAN Transceiver | |
| Interface | DC Motor Control 4EA include Encoder (정, 역회정 모터) | |
| Main Module : Front |
MCU | ST Cortex- M4 STM32F405 1024kb Flash / 192kb SRAM Up to 168MHz Frequecy |
| Interface | 후방 브레이크등 2EA (LED 램프) 후방 방향 지시등 2EA (LED 램프) 후방 후진등 2EA (LED 램프) Ultra Sonic 2EA (초음파 센서) Piezo 2EA (부저) |
|
| CAN Transceiver | TI SN65HVD232 CAN Transceiver | |
| 커넥티비티 모듈 & Battery |
AP | Broadcom BCM2835 1GHz ARM11 512MB of LPDDR2 SDRAM Micro-SD card slot Micore_USB sockets Bluetooht 4.0 |
| Camera Module | Pan tilt (include servo moter 2ea) Sony IMX 219 PQ CMOS sensor 해상도 : 3080×2464, 8-megapixel |
|
| Battery | 7.4V 5A 6000mA |